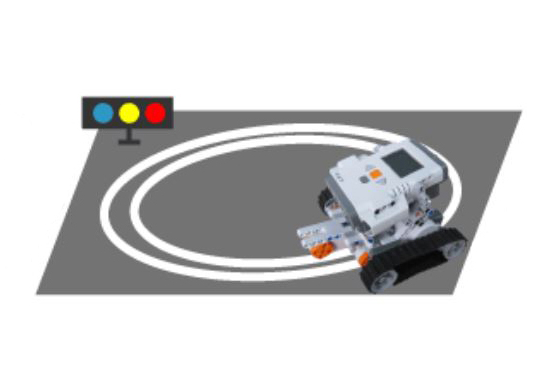
信号認識&運転制御デモ
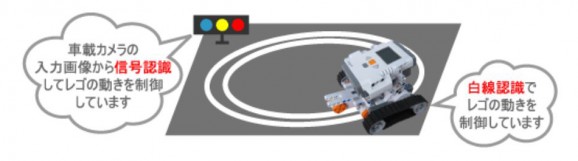
レゴに搭載されたカメラをワイヤレスLAN(wi-fi)で接続し、一台のPCだけで『白線認識』と同時に『信号認識』を行い、Bluetoothでレゴの車を制御しています。
開発内容
信号認識&運転制御デモ
レゴに搭載されたカメラをワイヤレスLAN(wi-fi)で接続し、一台のPCだけで『白線認識』と同時に『信号認識』を行い、Bluetoothでレゴの車を制御しています。 画像処理の課題解決は、いかにシンプルな手法で性能を落とさず実現するか?を解決することで、解決手段の応用範囲が広がります。
運転制御
白線認識の研究や論文はたくさん出されていますが、ワイヤレスLAN(wi-fi)やBluetoothでの情報量の少なさや、タイムラグを考慮して、 どれだけシンプルな処理で方向制御ができるかを考えた点がポイントです。重たい処理は一切使っていないため、高速化のチューニングを行わずに実現しています。 それが組込にはとても大切なことであるのを意識しました。
次にチャレンジしたことは、車の制御です。あえて制御のコマンドを『大回り』と『小回り』と『直進』の3種類だけを使うことにしました。 3種類のコマンドしか使用していないので、人間が運転するように、白線を見て右に寄り過ぎたから左に、左に寄り過ぎたから右に・・・と少しずつ補正しながら走行しています。 どんなコマンドを指示して制御しているのかデモ動画上に『コマンドウィンドウ』を用意しましたので、ご覧ください。
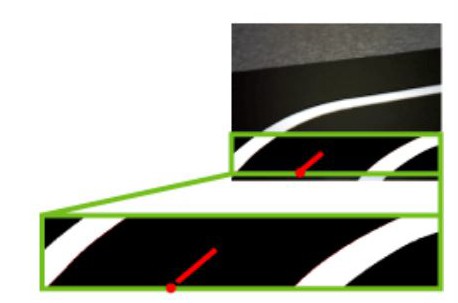
車載カメラからの画像
信号認識
人間にとっては比較的簡単に識別できますが、コンピュータで識別するには意外と難しい『色』にチャレンジしてみました。 人間の目にも、カメラにも『色』は光源に含まれている色成分とその対象物の反射率で変化します。 また、オフィスや展示会場など様々な環境下において、事前に光源の特性を知ることができなくても、その場で『色』を学習できる機能を持たせることで、その課題を解決いたしました。

車載カメラからの画像
デモ動画
ご登録のメールアドレス、パスワードをご入力のうえ、「ダウンロードする」ボタンを押して下さい。
ダウンロードが開始されます。
ダウンロードが開始されます。

自動はんだ付け装置・FA機器・画像処理製品 受託開発はアポロ精工株式会社
〒412-0047 静岡県御殿場市神場2271-7
TEL: 0550-88-2828 FAX:0550-88-2830
Copyright© Apollo Seiko Ltd. All rights reserved.
SCROLL DOWN
GROUP
テクノホライゾングループは、映像&IT及びロボティクス事業を核にさまざまな製品とサービスを提供し、
グローバルな「人と社会」に貢献することを事業のミッションといたしております。